Introduction. One of the most pressing issues of our time is how to feed nine billion people by 2050. Currently annual percentage crop yield increases are only half those required to meet projected food needs. Moreover, the challenges are not just increasing population and diets shifting toward meat, but climate change, declining water resources, and competing crop use demands (e.g. bioenergy)(Stone 2011).
A strategy would be to expand farming to lands now considered marginal for any of several reasons including limited water supply, poor soil quality, pollution from prior uses, and/or lack of an adequate transportation network (Pimentel 2012). In time, these might be partially or fully addressed by improved genetics and/or infrastructure improvements. All too often, however, land expansion, especially in the tropics, has entailed clear-cutting forested lands with adverse consequences for the global carbon balance. However, there is a fourth form of land impairment which, we believe, can be addressed – excessive steepness of grasslands that precludes farming with conventional equipment (Foley et. Al. 2011).
The 2011 National Land Cover Database (NLCD), the most recent Protected Areas Dataset (PADUS) and the 10-m resolution National Elevation Dataset (NED) were used to select land that is currently under shrubs or herbs, unprotected, and 6° to 25° steep (Figure 1). Within the 12 Great Plains states, a total of 116,000 km2 meets this definition, which compares to a total of about 200,000 km2 of wheat planted nationwide (USDA-ERS). There is substantial potential to profitably increase food production on these steep lands.
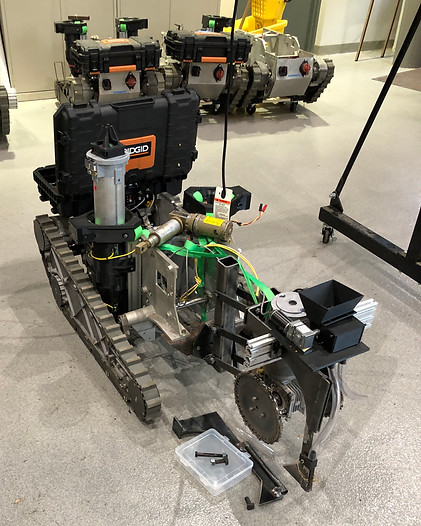
In this project we will explore the use of multiple, ground autonomous vehicles (GAV) to farm ground with slopes of up to 30 degrees.
Specifically, we will:
(1) Create vehicle mobility, design, and route-optimization models for highly sloped land from data on traction, power usage, slip, maneuverability, and soil compaction.
(2) Deliver a sloped-ground prototype planter based on conventional planting technology but scaled to and usable by small autonomous vehicles.
(3) Create a within-canopy sensor platform and analytics crop scouting system
(4) Deliver a harvesting steep sloped harvest system and perform feasibility/design studies of UAV enabled energy resupply (deliverable) and grain and seed transport. Also at stages 2-4 deliver an app for producer or scientist collaborative means to spectate and/or control the system.